Custom hydrolic Dumping truck controlled by android
Bluetooth floor cleaner robot IDP 1
(Integrated Design Project)
IDP is our 3rd year project 3 credit course where we need to develop a practical working model of any engineering theory or our own new ideas
one of my best 2nd year solidworks designs (v8 turbo charged engine)
Cycle Design
DIY bluetooth Controlled Lawn Mower
remote control car fabricated by 3d printing and laser cutting (ply wood)
The First Design !! Belt-pully transmission
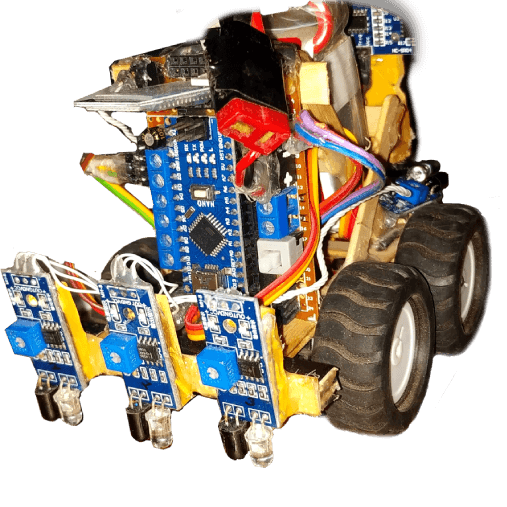
Previous version of LFR
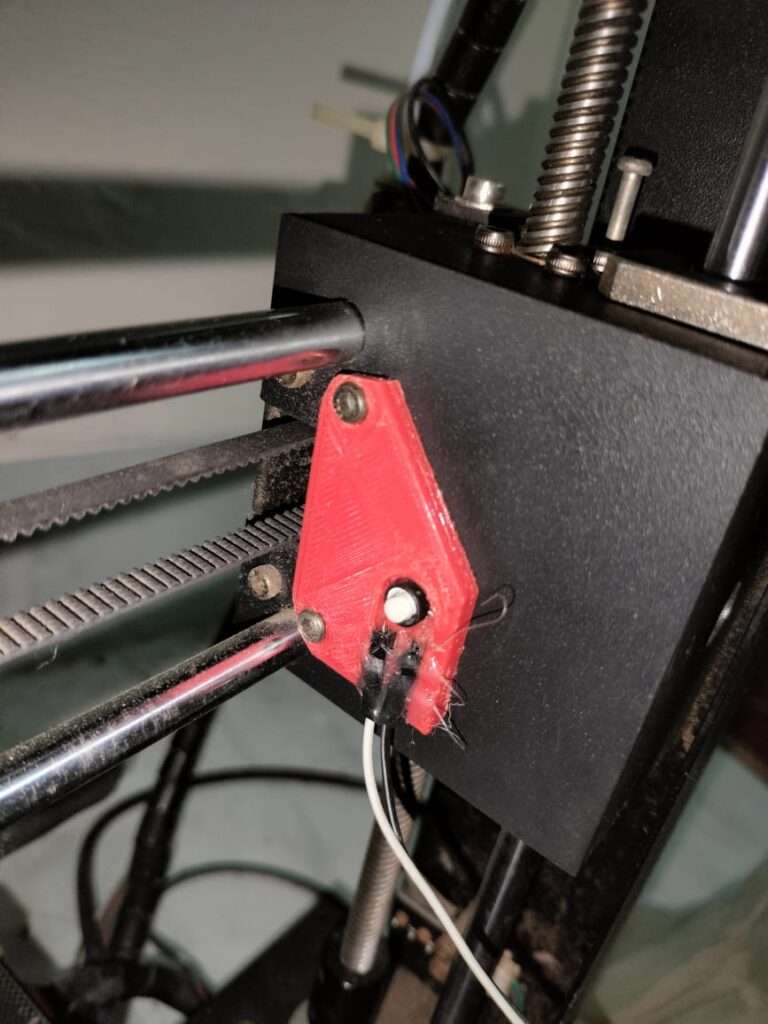
3D Printing Timelapse Project
I’ve attached a button on the printer and made a Python script to take a picture with the webcam when the button is pressed. Then I modified the Gcode to go and press the button after finishing each layer. So, all these efforts Capture pictures in every finished layer until fully printed. Finally if we make a 30fps or 24fps video out of these photos it will look something like this timelapse-
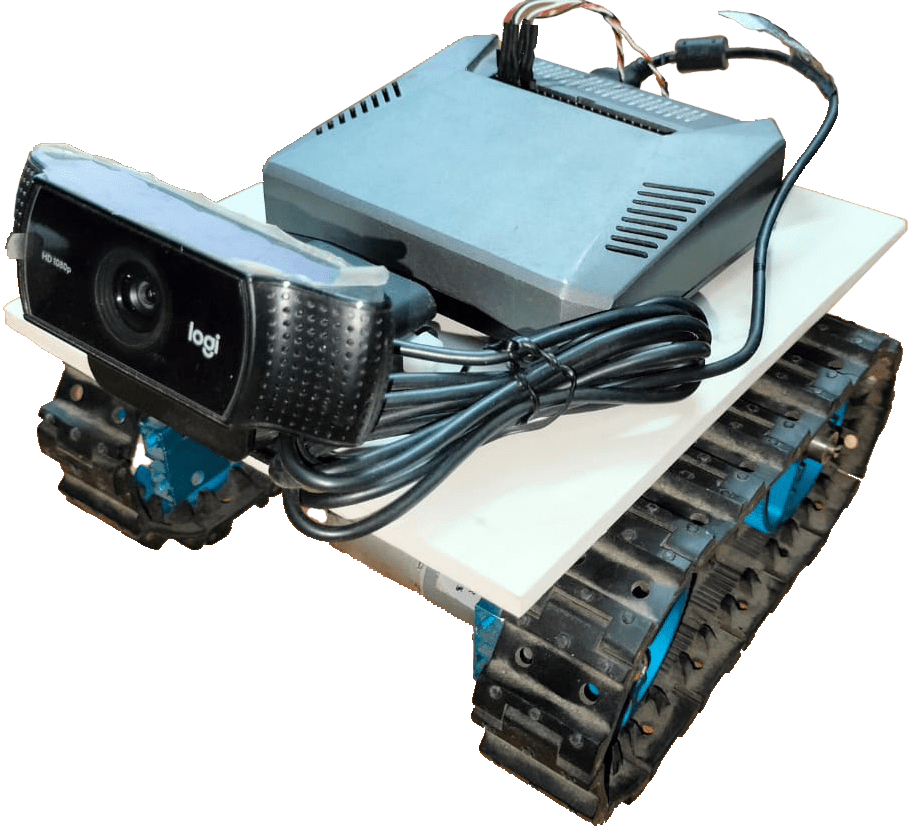
UGV with Deep Learning (Neural Network)
This project is one of my ongoing Machine learning projects. I’ve done some regression and classification problems using machine learning. This falls under the classification type category. Here I plan to manually drive the car, capture images, and record their corresponding steering values in a CSV file. Subsequently, I will process the data, involving tasks like cleaning, normalizing images, and partitioning the dataset into training and testing sets. The core of the project lies in training a deep learning model, testing it, and fine-tuning parameters for maximum accuracy. Finally, use the model to make a fully autonomous vehicle that can make decisions just like Tesla. For now, It will be able to adjust the turn value keeping a constant speed.
Beyond this immediate objective, the completion of this project will establish my own workable pipeline to make the robot learn additional data in the future. This includes data of road signals, traffic jams, human crossing, and road conditions. Basically, I aim to enhance the robot’s capabilities, enabling it not only to adjust turn values but also to regulate its speed in response to various scenarios.